
机器人3D视觉引导
智能视觉导航,助力工厂自动化升级
革新您的机器人应用
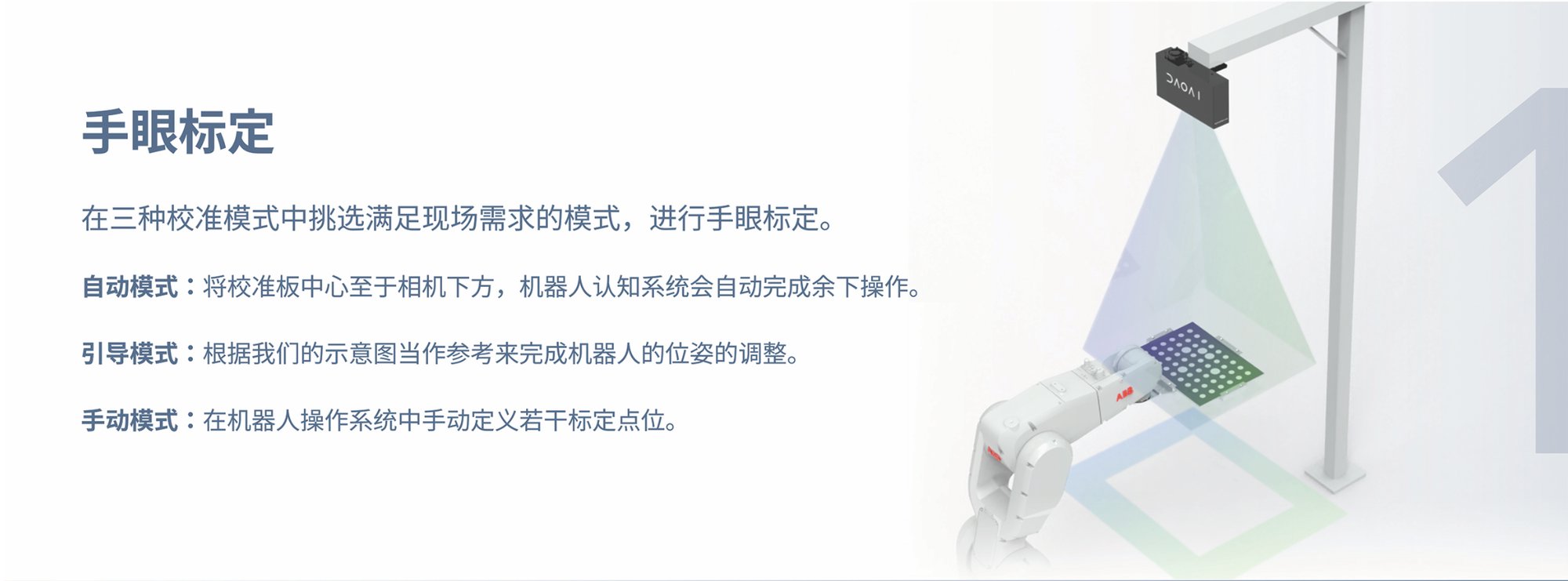
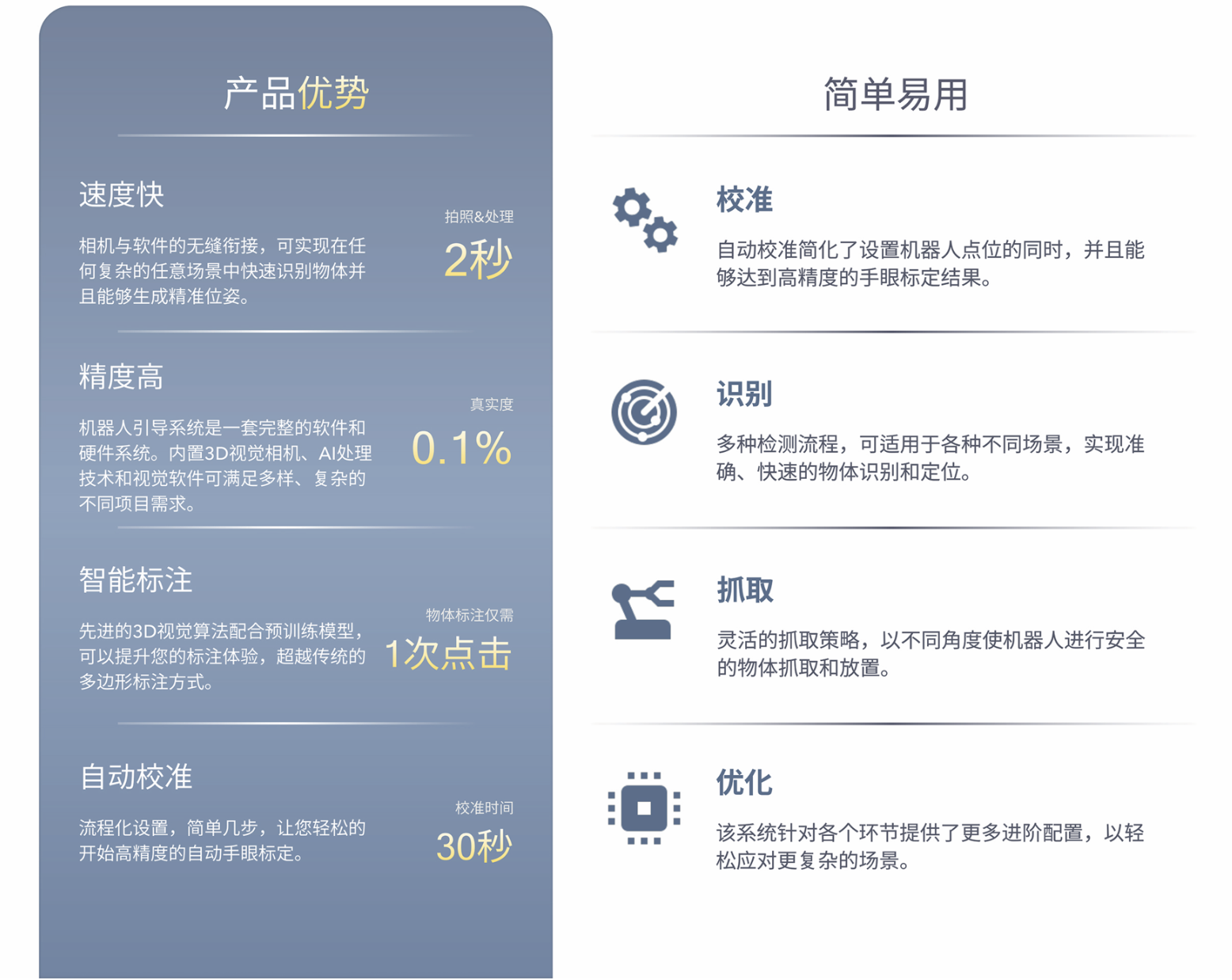
微链道愛机器人引导系统是一套完整的软件和硬件系统。内置3D视觉相机、AI处理技术和视觉软件可满足多样、复杂的不同项目需求。机器人引导系统无须代码编程即可完成路径规划、碰撞检测、抓取规划等。
.webp)
.webp)


引导系统应用
.webp)

|
BP-AMR-GPU |
BP-S |
BP-M |
BP-L |
|
|---|---|---|---|---|
|
工作距离 (mm) |
300 - 600 |
500-1000 |
800-1800 |
1000-3000 |
|
最佳视野范围(FOV)(mm) |
331 x 230 |
665 x 394 |
897 x 560 |
1725 x 971 |
|
图像分辨率 |
130万像素 |
230万像素 |
230万像素 |
230万像素 |
|
基线长度 (mm) |
110 |
130 |
280 |
360 |
|
校准精度 1 (mm) |
0.2 |
0.07 |
0.25 |
0.32 |
|
Z向重复定位精度 2 (mm) |
0.1 |
0.04 |
0.08 |
0.14 |
|
3D 图像采集时间 |
0.6 - 1.1s |
0.8 - 1.3s |
0.8 - 1.3s |
0.8 - 1.3s |
|
光源 |
双摄像头; 白色 LED |
双摄像头; 白色 LED |
双摄像头; 白色 LED |
双摄像头; 白色 LED |
|
尺寸(mm) |
160 x 55 x 95 |
200 x 212 x 93 |
306 x 203 x 93 |
400 x 254 x 107 |
|
重量 (kg) |
0.6 |
2.3 |
4.5 |
5.2 |
|
通信接口 |
以太网 |
以太网
|
以太网
|
以太网
|
|
工作温度 |
0 – 40°C |
0 – 40°C |
0 – 40°C |
0 – 40°C |
|
散热方式 |
被动散热 | 被动散热 | 被动散热 | 被动散热 |
1 校准精度:在最佳视野范围(FOV)及距离中采集目标校准板的平均测量误差
2 Z重复定位精度: 在最佳工作距离下扫描15次全视野(FOV)中100个样本点的Z值标准偏差
如有疑问,欢迎咨询
我们专业团队随时为您服务